Tytułowe określenie od kilku już lat pojawia się w opisach technicznych samochodów. Ponieważ nie doczekało się ono jeszcze trafnego polskiego odpowiednika, warto przybliżyć Czytelnikom, co się pod nim kryje.
Idea i cel stosowania
Sens Torque Vectoringu sprowadza się do płynnego, asymetrycznego rozdziału momentu obrotowego pomiędzy dwa koła napędzanej osi, najczęściej tylnej. Dzięki temu np. podczas pokonywania zakrętu więcej siły napędowej trafia na koło zewnętrzne, a mniej na wewnętrzne względem środka łuku. Wytwarzany w ten sposób moment obracający pojazd wokół osi pionowej o wartości ok. 1400 N·m w czasie rzędu 100…150 ms stabilizuje tor jazdy podobnie, jak układ ESP/ESC, ale wcześniej i bez ingerencji w działanie hamulców. W rezultacie, gdy charakterystyka kierowalności samochodu zacznie zbytnio przesuwać się w stronę pod- lub nadsterowności, ze szkodą dla stateczności ruchu krzywoliniowego, system przywróci jej neutralny przebieg, zapewniający pewne prowadzenie pojazdu.
Działanie i budowa
Torque Vectoring działa nie tylko pod obciążeniem (podczas przyspieszania), ale także podczas hamowania silnikiem, np. w trakcie zjeżdżania krętą drogą ze wzniesienia bez przyspieszania lub przy wyłączonym sprzęgle głównym. Poza poprawą bezpieczeństwa jazdy przyczynia się (dzięki ograniczeniu funkcjonowania układu ESP/ESC) do zmniejszenia zużycia okładzin hamulcowych i opon oraz do redukcji zużycia paliwa.

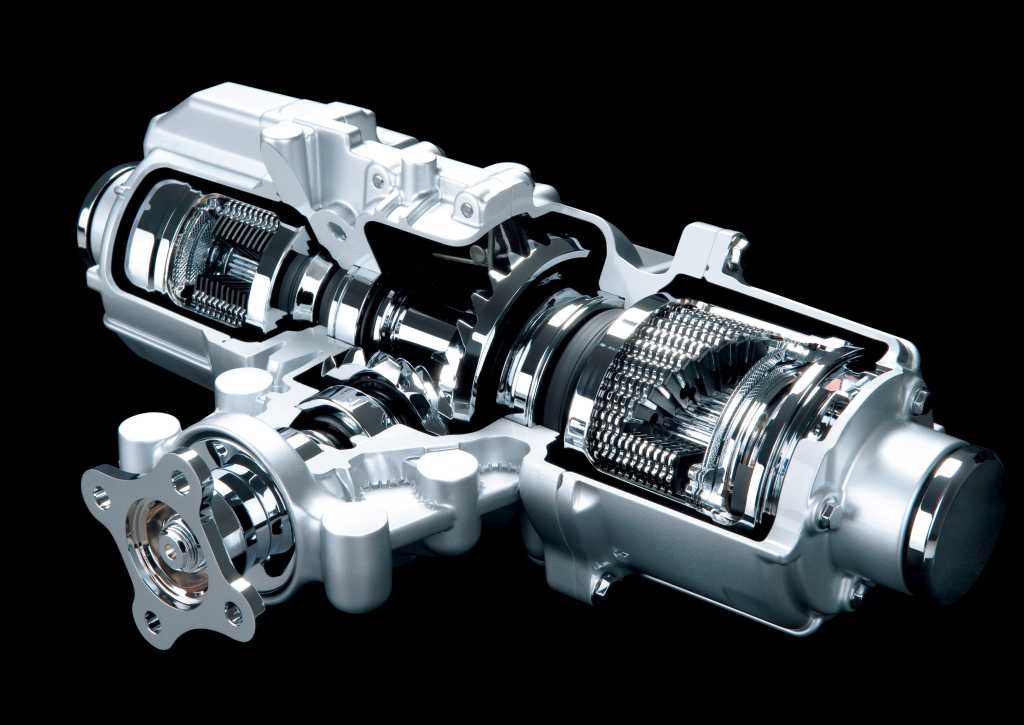
Serce urządzenia stanowią dwie planetarne przekładnie sumujące o dużym przełożeniu (po jednej z lewej i prawej strony tylnej przekładni głównej, tj. na każdej półosi) współpracujące odpowiednio z dwoma sprawnymi i wytrzymałymi cieplnie, mokrymi sprzęgłami wielopłytkowymi, sterowanymi – w zależności od rozwiązania – elektromechanicznie lub elektrohydraulicznie. W pierwszym przypadku w skład układu wchodzą cewki elektromagnetyczne (np. Honda) lub silniki elektryczne (np. BMW), w drugim – pompa hydrauliczna (np. Audi). Na podstawie danych zebranych przez czujniki położenia pedału przyspieszenia, prędkości obrotowej wału korbowego silnika i kół napędzanych, przyspieszeń bocznych, kąta obrotu pojazdu wokół osi pionowej oraz kąta skrętu i prędkości obrotu kierownicy elektroniczny sterownik uruchamia elementy wykonawcze, które włączają i wyłączają sprzęgła. Podczas jazdy na wprost po przyczepnej nawierzchni obie przekładnie planetarne są zablokowane, by na zakręcie lub w przypadku poślizgu jednego z kół przyspieszyć obroty półosi o 5% (Honda), 10% (Audi), a nawet 20% (różnica momentu obrotowego między kołem lewym a prawym może sięgać 1800 N·m). Ze względów bezpieczeństwa układ jest wyposażony w dwa redundantne obwody sterujące, kontrolujące się wzajemnie, a w razie poważnego uszkodzenia pracuje jak zwykły mechanizm różnicowy, spełniając wymagania normatywne ISO 26262 na poziomie ASIL D. Głównym warunkiem precyzyjnego działania urządzenia pozostaje odpowiednia jakość oprogramowania sterującego oraz szybkie i jednoznaczne komunikowanie się z innymi układami pojazdu.
Funkcjonalnie zatem Torque Vectoring to w gruncie rzeczy stożkowy mechanizm różnicowy zachowujący się trochę jak, jakby był wyposażony w możliwość zwiększania tarcia wewnętrznego (LSD) bez udziału dodatkowych elementów i rozbudowany o niektóre funkcje zarezerwowane dotychczas dla elektronicznych układów stabilizacji toru jazdy (ESP/ESC) i zapobiegających zerwaniu przyczepności kół napędzanych podczas ruszania (ASR), realizowane jednak tylko na drodze asymetrycznej dystrybucji między półosie napędowe dostarczanego w danej chwili przez silnik momentu obrotowego. Konstrukcyjnie Torque Vectoring jest zwykle zintegrowany z klasyczną hipoidalną przekładnią główną i tylnym stożkowym mechanizmem różnicowym, jednak w niektórych rozwiązaniach tradycyjny dyferencjał staje się w ogóle zbędny – jego funkcje w całości przejmują przekładnie planetarne i sprzęgła wielopłytkowe (Honda) lub nawet tylko same sprzęgła (Land Rover Discovery Sport, Nissan Juke 4WD). W tym ostatnim, zasadniczo przednionapędowym samochodzie, Torque Vectoring odpowiada także za dołączanie i odłączanie w razie potrzeby napędu kół tylnych.
Geneza i perspektywy rozwoju
Sama idea rozwiązania umożliwiającego celowe sterowanie momentem napędowym pochodzi jeszcze z lat trzydziestych ubiegłego wieku i została opracowana przez Francuza nazwiskiem Pierre-Louis Chassagny, który opatentował szereg koncepcji przekładni sumujących. Edward Habich, profesor Politechniki Warszawskiej, w zaprojektowanym przez siebie w latach 1951–1953 ciągniku kołowym EH 4×4 zaproponował wykorzystanie, podczas skrętu, znoszenia bocznego opon obu kół od wewnętrznej strony zakrętu, wywołanego działaniem dwustopniowego mechanizmu różnicowego, sterowanego kołem kierownicy. Patent austriackiego inżyniera Waltera Fleischa z 1970 r. opiewał na zastosowanie podobnego pomysłu do kierowania pojazdami gąsienicowymi, w których skręt realizuje się przez przyhamowanie wewnętrznej gąsienicy. Jednak dopiero w obecnym stuleciu rozwój mechatroniki pozwolił na praktyczne wykorzystanie wszystkich możliwości takich urządzeń w samochodach osobowych. W Europie zajęły się tym specjalistyczne firmy, np. GKN i Ricardo (Torque Vectoring™), tworząc podstawy konstrukcji i podejmując się roli poddostawców dla takich koncernów jak Magna Steyr czy ZF (Vector Drive®), zajmujących się montażem końcowym kompletnego zespołu oraz produkcją i dostarczaniem całych modułów napędowych na potrzeby producentów pojazdów.
Jak prawie każda innowacja, Torque Vectoring najpierw pojawił się w pojazdach wyczynowych (rajdowe Mitsubishi Lancer Evo IV), a potem w seryjnych samochodach wyższych klas z napędem 4×4 (a więc o naturalnej tendencji do podsterowności), by następnie trafić do aut o bardziej popularnym charakterze (np. Nissan Juke Nismo 4WD). Należy zatem zapewne spodziewać się jego dalszego rozpowszechnienia, tym bardziej, że analogiczny efekt można względnie łatwo uzyskać w pojazdach o napędzie hybrydowym (np. Honda NSX, Lexus/Toyota) i elektrycznym (np. Mercedes-Benz SLS AMG Electric Drive), zwłaszcza z oddzielnymi silnikami poruszającymi niezależnie każde z kół (np. umieszczonymi w ich piastach), co otwiera zupełnie nowe możliwości sterowania przepływem momentu napędowego. Nad urzeczywistnieniem takiej koncepcji pracuje już m.in. Bosch.








Redakcja nie ponosi odpowiedzialności za treść komentarzy, które są wyłącznie prywatną opinią ich autorów. Jeśli uważasz, że któryś z kometarzy jest obraźliwy, zgłoś to pod adres redakcja@motofocus.pl.
Anonim, 7 kwietnia 2016, 11:29 0 0
hehehehehehehehehehehehehe
Odpowiedz